养过宠物的人都知道,动物是非常敏捷的。他们能够做的一些事情非常令人印象深刻。伯克利伯克利人工智能研究 (BAIR) 实验室的一组研究人员正试图教机器人像动物一样移动。科学家们表示,他们已经提出了一个通过模仿动物来学习机器人运动技能的框架。
该框架使用记录的动物参考运动剪辑,使用强化学习来训练控制策略,使机器人能够模仿现实世界中的运动。通过为系统提供不同的参考动作,该团队可以训练四足机器人执行各种敏捷行为。
机器人学习的行为范围从快速步行门到动态跳跃和转弯。机器人的策略最初在模拟环境中进行训练,然后使用潜在空间适应技术将训练转移到现实世界。该技术可以使用来自真实机器人的有限数据量有效地调整策略。
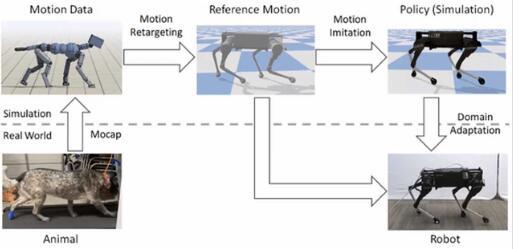
科学家表示,该框架具有三个主要组成部分,包括运动重定向、运动模仿和领域适应。使用给定参考运动的第一步是创建运动重新定位阶段图,将运动从原始动物的形态重新定位到机器人形态。下一步是运动模仿阶段,并使用重新定位的参考运动来训练在模拟环境中模仿运动的策略。最后一步是域适应阶段,通过样本有效的域适应过程将策略从模拟转移到真实机器人。
该团队指出,模拟器通常只提供对现实世界的粗略近似。因此,在模拟中训练的策略在现实世界中通常表现不佳。转移策略将模拟交易到现实世界,该团队使用样本高效的域适应技术使策略适应现实世界,只需在真实机器人上进行少量试验。该技术能够适应最初表现不佳的场景,该场景导致机器人跌倒到机器人稳定的场景中。结果是一个更快、更流畅的移动机器人。















