研究人员创造了一种新的手术工具,以帮助提高远程手术手术的精度和控制。这款新设备是由 Wyss 副教员 Robert Wood 博士和索尼公司的机器人工程师 Hiroyuki Suzuki 合作设计的。他们创造的设备是一个采用折纸设计的手术机器人。
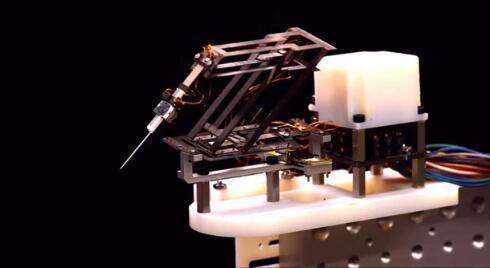
该设备是一个微型远程运动中心操纵器,称为 mini-RCM。它大约有一个网球那么大,重量大约和一分钱一样重。它已经能够在模拟中执行有问题的显微外科任务。该设备的设计使用层状沉积并粘合在一起的材料。然后该团队用激光切割出一个特定的图案,可以弹出 3D 形状,类似于儿童读物。
该技术简化了小而复杂结构的批量生产。如果不使用他们的构建方法,这种复杂的系统将不得不手工构建。研究人员创造了一个平行四边形形状作为机器人的主要结构,然后制造了三个线性执行器来控制机器人的运动。一个平行于结构底部的执行器升高和降低,而一个垂直于平行四边形的执行器旋转它。
另一个是在平行四边形的尖端,它延伸缩回正在使用的工具。结果是一个比以前开发的其他显微外科设备更小、更轻的机器人。所使用的致动器围绕压电陶瓷材料构建,当施加电场时能够改变形状。形状变化像轨道上的火车一样推动致动器转轮单元和轨道单元。线性运动移动机器人。
该团队还将基于 LED 的光学传感器集成到机器人中,以检测和纠正与所需运动的任何偏差,例如由手颤引起的偏差。研究人员说,这种创造比外科医生的手要稳定得多。















