麻省理工学院在过去五年中一直致力于小型自主船,最近做出了一些重大改变。这种名为 Roboat 的自主船现在有两米长,可以载客。最新版本称为 Roboat II,它还有一种新算法,称为同步定位和映射或 SLAM。
其他新功能包括称为非线性模型预测控制器的基于模型的优化控制器和称为移动范围估计的基于优化的状态估计器。关于 Roboat 的新论文的资深作者、麻省理工学院教授 Daniela Rus 表示,Roboat II 可以使用类似于自动驾驶汽车使用的算法进行自主导航。这些算法适用于水,麻省理工学院正在开发能够运送人员和货物的船队。
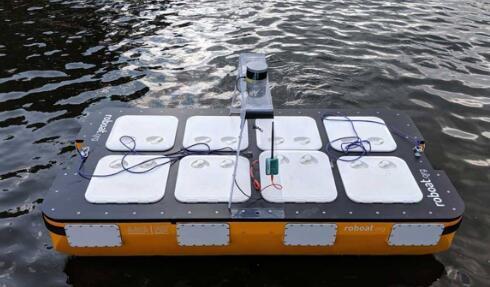
与最初的 Roboat 船队一样,Roboat II 也可以与其他 Roboat II 船只连接,形成一系列自主平台,以实现水上活动。麻省理工学院表示,Roboat II 是一艘“半比例”船,加入了原始 Roboat 的四分之一比例船。未来,研究人员打算建造一个全尺寸版本,长四米,可搭载 4 至 6 名乘客。
Roboat II 利用其算法在阿姆斯特丹的运河中自主导航三个小时,同时收集数据。任务完成后,该船返回起始位置,误差为 0.17 米,不到 7 英寸。
Roboat II 旨在使用分布式控制器自组装成一个连接的多单元列车,分布式控制器由整个系统中的传感器、控制器和相关计算机的分布式集合组成。该团队的灵感来自一群蚂蚁如何在没有交流的情况下运输食物。连接的机器人之间没有直接通信,只有领头机器人知道目的地。领头人开始向目的地移动,其他机器人会估计领头人的意图并相应地调整动作。















