机器人材料的研究人员旨在人为地控制动物的运动,以解决软机器人中驱动,控制和功率要求方面的现有挑战。在《科学进展》的新报告中斯坦福大学生物工程学,土木与环境工程学和机械工程学系的Nicole W. Xu和John O.Dabiri展示了一种生物混合机器人,该机器人利用微电子技术诱使活水母游泳。他们测量了在最佳频率范围内以比自然行为更快的速度驱动身体收缩来显着增强推进力的能力。这种动作将游泳速度提高了近三倍,尽管动物的代谢消耗仅增加了两倍,而输入微电子设备的外部功率只有10毫瓦。这种生物混合型机器人每质量所消耗的外部功率比以前报道的水生机器人少10至1000倍。与原始性能相比,该功能可以改善生物混合机器人的性能范围,
水母由于具有较低的运输成本(COT)而成为形成节能型水下航行器的引人注目的模型生物。现有的完全由工程材料制成的游泳动物仿生机器人可以实现与天然动物相当的速度,但是效率要比水母低几个数量级。因此,生物混合水母机器人可以整合活体动物,以应对软机器人技术的现有挑战。研究人员可以利用水母结构进行驱动,并通过探索自然进食行为来解决动力需求,从而从原地从猎物中提取化学能。该方法还可通过动物固有的自然伤口愈合过程从损伤中恢复,控制动物的活动并允许在用户控制的实验中进一步研究活生物体的生物力学。在这项研究中,Xu和Dabiri使用微电子系统从外部控制活水母,并形成了生物混合机器人,以推动水上运动的科学与工程。
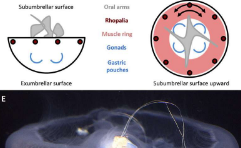
为了激活水母作为天然支架,研究小组利用了动物自身的基础代谢来减少额外的能量需求,并利用其肌肉进行致动,同时依靠自我修复和组织再生特性来提高损伤耐受性。该小组假设,增加水母的钟形收缩频率可以将游泳速度提高到极限。因此,他们通过测量游泳速度和氧气摄入量来外部计算自由游泳动物的脉冲频率,以计算运输成本(COT)并测试其工作假设。以前,此类检查只能通过计算或理论模型进行。