在自动驾驶中,基于立体视觉的深度估计技术可以帮助准确估计障碍物的距离,这对于正确的车辆路径规划至关重要。
立体深度估计问题已被公式化为具有卷积神经网络的深度学习模型。但是,这些模型需要大量的后处理,并且不具有对不适定区域或新场景的强大适应能力。另外,由于在实际情况下难以标注真实地面深度,因此该系统的训练数据受到限制。
由中国科学院深圳先进技术研究院(SIAT)的张切石博士领导的研究团队提出了一种新的技术解决方案,以解决当前自动驾驶的深度估计问题。
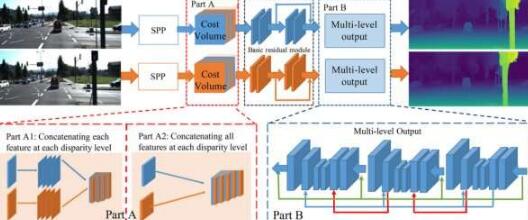
研究人员提出了一种自我改进的金字塔立体网络,该网络可以直接获得回归视差而无需复杂的后处理,并且在不适定区域具有强大的鲁棒性。
此外,通过在线学习,提出的模型不仅可以解决数据限制问题,而且可以节省实践中在培训和硬件资源上花费的时间。同时,它具有对新场景的自我完善能力,可以根据测试数据及时及时调整,提高了预测的准确性。
实验和基准测试表明,所提出的网络可以实现深度估计,错误率为8.3%。
该研究发表在IET智能交通系统上。















